

The Limits of Autonomy. Critically Assessing Factors Limiting Full Autonomy of Military Uncrewed Ground Vehicles
The robots are coming! In 2024, no week has passed without eye-catching headlines stating that “the robot wars have […] begun”1 as part of “a new revolution of warfare.”2 As robots are increasingly integrated into society, they are also being introduced into the military. In the land domain, military robots are not necessarily humanoids, a la iRobot, but are often uncrewed ground vehicles (UGVs). Looking closely, it becomes clear that we are quite far from the controversial notion of ‘fully autonomous’ robot warfare. High levels of autonomy likely won’t be achieved in UGVs in the mid-term, as the features that enable it are, ironically, its main weakness.
Many actors within security and defence circles portray autonomous uncrewed ground vehicle (AUGVs) as an essential new item in warfare, a “game changer”3 that needs to be developed and integrated to keep up with the robotic aided warfare4 that will render armies “future-proof.”5 Inspired by the presumed success of self-driving cars, it appears that autonomous driving – powered by the synergy of advanced mechanical engineering and artificial intelligence (AI) – is an inevitable technical development in the military realm, allowing the completion of missions independent of human interaction or supervision. Just this year alone, the European Defence Fund is granting 50€ million in funding to research autonomy for uncrewed ground vehicles (UGVs).6
However, zooming in on the technologies that are essential to realise autonomy, it becomes clear that full autonomy or automation (the latter refers to levels of autonomous driving of cars) likely won’t be achieved anytime soon. Problems limiting autonomy of self-driving cars, such as with lane detection, enabling algorithms, sensors7 and the availability of training data,8 are only exacerbated in the military realm.
Considering the contextual factors limiting full autonomy of military UGVs enables a broader view of gradual developments and integration. It shows that AUGVs are developing far more slowly than envisioned, opening spaces for political agency. This comes at a pivotal moment, as AI-enabled applications are already being integrated into the military to support operations and decision-making,9 normalising algorithmic warfare, and increasing capacity of machines to decide in certain cases on the use of force.10 A deeper understanding of the technical limitations of military platforms not only helps to counterbalance the prevalent techno-optimism within the arms industry, it also enables more informed discussions about ethical, legal, and operational concerns, allowing for better adaptation of use cases, procurement policies, and regulations.
The Rationale behind AUGVs
AUGVs are often associated with lethal autonomous weapon systems (LAWS), though significant efforts in robotics engineering are currently focused on first achieving full autonomy and automation of the platform. This focus on full autonomy is driven by developers as a proof-of-concept, and militaries are hoping for the potential to save resources and reduce costs. In general, fully autonomous platforms promise financial advantages, help address labour shortages, enable new mission types, protect soldiers, and lower the political costs associated with military engagements.11
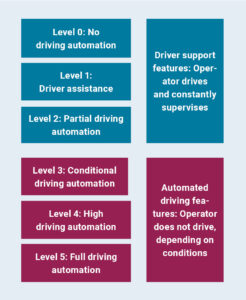
The Society of Automotive Engineers (SAE) Levels of Driving Automation™ framework describing degrees of autonomy for cars can also be applied to assess the autonomy of UGVs, as uncrewed cars are essentially a type of uncrewed ground vehicle.12 Full autonomy corresponds to level 5 (see box), i.e. full driving automation, which has so far not been realised in self-driving cars due to safety concerns and the complex challenges presented by urban environments.13 However, in the military domain, the highest levels of automation are needed for effective use, because operations with lower level of automation are “very man-power intensive”14 and diminish the potential for sought-after advantages.
Use Cases of AUGVs
Four areas of application are commonly discussed for military UGVs.15 First, AUGVs can be used for service and support tasks, such as the carrying of ammunition or the evacuation of injured personnel – essentially a robot that can assist soldiers during missions. Ideally, full autonomy would reduce the need for personnel deployment and enable longer missions with less physical strain on staff. Second, full AUGVs enable new opportunities for intelligence, surveillance and reconnaissance (ISR) missions, because they have the potential to enter contested areas or structures too dangerous or otherwise inaccessible to humans. Third, AUGVs equipped with weapon systems could be used defensively to protect assets, positions, territories, or soldiers. Similarly to other applications, the underlying idea is to minimize personnel and keep them out of harm’s way. The last area of application for AUGVs is the offensive use of force. This text focuses not on the discussion of LAWS but on the autonomy of the platform.
The project is funded by the Federal Foreign Office for a period of four years (January 2023 to December 2026).

Contextual Challenges to Autonomy
The main problem to overcome to achieve full autonomy in all conditions, i.e. SAE Level 5, is unpredictable and uncooperative obstacles in a rapidly changing environment that require complex decision-making. Teaching a robot to fulfil its task, navigate the environment, and solve problems safely and effectively is harder than it sounds, because machines cannot ‘think’ creatively. For example, if an AUGV is trained to avoid a specific object, e.g. a cow, it may run into problems when it encounters these objects in large numbers in a different environment, e.g. a herd of cows in the rain, because the uncertainty and complexity of the situation increases dramatically and overwhelms the vehicle’s capabilities, i.e. its ‘decision-making’ framework.16 The latter depends on the information it perceives, which is characterised by several contextual factors, in this case those specific to the land domain.
First, UGVs are confined to the planar surface and cannot utilise a 3rd spatial dimension. Of course, one could argue that robots could theoretically jump over an object, however, UGVs are driving on the surface, therefore avoiding uncooperative and unpredicted objects is very challenging without human intervention. Again, driving through a cow herd safely is already a stressful situation for a human and more difficult than simply flying overhead.
Second, land vehicles are expected to operate in challenging environments, such as on rugged terrain, beaches, or ice, but also in complex urban environments where they might need to climb stairs or quietly approach an object on asphalted streets. Next to the surface quality, the light and weather can change extremely or may differ significantly depending on the location, flora, or fauna. The extent and quality of the change is the key factor here: while in air and water, current conditions, salinity, humidity and temperature also change, conditions on land are complex and can quickly present completely different conditions for movement.
Next to hardware customisation, the extent to which the AUGV’s decision-making software can cope with the above-mentioned environmental factors is decisive for the degree of autonomy. Software is responsible for translating the environmental data received by the AUGV into machine-useable information – a highly complex process combining different types of data, such as vehicle state, position and environment – and analyse them using a combination of machine-learning based decision structures and hardcoded rules.17 Optical sensors like cameras and LiDAR sensors are essential for AUGVs to navigate their immediate environment. Geographical position is mostly determined via connections to global navigation satellite systems (GNSS), while diverse sensors monitor the vehicle state, such as speed or acceleration.
For humans, a simple task like walking over a ditch, navigating high grass, or recognising a fallen tree can be bypassed, yet for AUGVs the same problem is technically challenging, as the AUGV must accurately interpret and adapt to the information it perceives. This interpretation, behaviour and learning is limited to the variety of training data and pre-learned scenarios, as well as the performance of the underlying algorithm. For example, despite ongoing advancements in deep learning for object recognition in images, research shows that small or ambiguously shaped objects remain difficult to identify, a problem that limits a robot’s perception capability, which is crucial for safe and reliable autonomous operation in complex environments.18
Lastly, hostile combat situations are highly unpredictable and complex, with kinetic impacts from weapons affecting both vehicles and surroundings. These conditions, which demand complex decision-making from humans, are even more challenging for machines. Alongside physical damage and rapid changes, troops and equipment are vulnerable to intelligence, surveillance, and reconnaissance (ISR), as well as electronic warfare (EW) countermeasures, such as signal jamming. Signal management strategies like minimizing radar, light, and heat, are crucial for survival, but most UGVs rely on detectable active sensors like LiDAR. Another vulnerability is dependence on GNSS, which can be easily jammed, as seen in Ukraine.19 While “electronic warfare-proof” products are being developed for aerial drones, no public solutions for UGVs exist yet.20 Although several military technology companies claim to offer such systems—promoted as “autonomy kits”—real-life demonstrations, like those witnessed by the author at the European Land-Robot Trial 2024, suggest otherwise.
The Crux of Autonomy in the Land Domain
Autonomy is often seen as an EW-resistant feature, as it would allow a mission to continue without contact or interaction with an operator in a contested environment. However, given the real-world conditions that military UGVs face in combat, this scenario is currently unrealistic. Ironically, the very sensory capabilities that enable full autonomy in the land domain are also the main hindrance to its implementation. The increase in military efficiency through AUGVs depends on the successful full automation of the vehicles, that can only be realised with a sensor suite which – according to the current state of the art – renders the vehicles dependent on human operators in contested environments; contact being one of the main things that is supposed to be redundant with autonomy.
In the near future, AUGVs may handle non-critical tasks like transporting materials in favourable conditions (without jamming, ISR, or communication issues) where handling unpredictable scenarios is not crucial for survival. Currently, UGVs rely on human operators, with autonomy used as driver assistance, like Diehl Defence’s Ziesel, used for evacuation or other support tasks.21 Another tested use is in ‘convoy’ mode, where an uncrewed vehicle follows a human-operated one, as demonstrated by Rheinmetall’s InterRoc project, in cooperation with the German Armed Forces.22
Military UGVs, aside from some non-autonomous experimental small vehicles in Ukraine,23 are expensive, high-tech robots, whose initial purchasing costs and upkeep pose challenges, and it is yet to be seen to what extent interoperability with other platforms would be efficient, feasible, and wanted by the commanding officers and soldiers.24

Autonomy as the Non-Solution?
The key question is whether autonomy can truly solve the problems it promises to and if the investment is worthwhile. This Spotlight aimed to highlight the technical limits and realistic military uses of AUGVs to guide an informed response to this problem. Beyond technical challenges, social, legal, and ethical implications, must also be considered. In that sense it is currently doubtable whether AUGVs will be broadly fielded in the near future, a dynamic that can be different for teleoperated robots or those used in other physical domains. Considering the wide array of problems connected to just driving autonomously, equipping platforms with autonomy-capable payloads will come with additional challenges. This is an opportunity to steer technological choices according to societal preferences, values, and norms.
Even though we are currently a long way from the controversial ground robot wars, the discussion about these technologies is an act of balancing the exaggerated claims of the arms industry and technology optimists who believe in the robotic revolution, while carefully considering the consequences of increased integration of algorithmic means into warfare. By showing the limits of autonomy, the space for political intervention in the military innovation processes can be opened, allowing us to question whether the automation of warfare is as inevitable as some might have us believe.25 In the end, political participation is at the heart of democratic military planning, as it can counter the assertions of some that autonomy, its development, testing, and perceived success will normalise high-tech military solutions as accepted alternatives to political ones.26

Reihen
Ähnliche Beiträge
Schlagwörter

Liska Suckau